
全国咨询热线
全国咨询热线

个人认为贪心,\(dp\) 是最难的,每次遇到题完全不知道该怎么办,看了题解后又瞬间恍然大悟(TAT)。这篇文章也是花了我差不多一个月时间才全部完成。
用动态规划解决问题具有空间耗费大、时间效率高的特点,但也会有时间效率不能满足要求的时候,如果算法有可以优化的余地,就可以考虑时间效率的优化。
\(DP\) 高时间效率的关键在于它减少了“冗余”,即不必要的计算或重复计算部分,算法的冗余程度是决定算法效率的关键。而动态规划就是在将问题规模不断缩小的同时,记录已经求解过的子问题的解,充分利用求解结果,避免了反复求解同一子问题的现象,从而减少“冗余”。
但是,一个动态规划问题很难做到完全消除“冗余”。
下面给出动态规划时间复杂度的决定因素:
时间复杂度 \(=\) 状态总数 \(×\) 每个状态转移的状态数 \(×\) 每次状态转移的时间
\((1).\) 改进状态表示
\((2).\)选择适当的规划方向
\((1).\) 四边形不等式和决策的单调性
\((2).\) 决策量的优化
\((3).\) 合理组织状态
\((4).\) 细化状态转移
\((1).\) 减少决策时间
\((2).\) 减少计算递推式的时间
(上述内容摘自 《动态规划算法的优化技巧》毛子青 ,想要深入了解其思想的可以去看看这篇写得超级好的论文。)
看到这里是不是已经感觉有点蒙了呢?
本蒟蒻总结了一个简化版本:
在推导 \(dp\) 方程时,我们时常会感到毫无头绪,而实际上 \(dp\) 方程也是有迹可循的,总的来说,需要关注两个要点:状态,决策和转移。其中 “状态” 又最为关键,决策最为复杂。
关于 “状态” 的优化可以从很多角度出发,思维难度及其高,有时候状态选择的好坏会直接导致出现暴零和满分的分化。
与 “状态” 不同,“决策” 优化则有着大量模板化的东西,在各大书籍,文章上你都可以看到这样的话:只要是形如 \(XXX\) 的状态转移方程,都可以用 \(XXX\) 进行优化。
“转移” 则指由最优决策点得到答案的转移过程,其复杂度一般较低,通常可以忽略,但有时也需要特别注意并作优化。
本文将会重点针对 “决策” 优化部分作一些总结,记录自己的感悟和理解。
\(updata\) 之后由于篇幅过大,已搬出。。。。。
补充:其实质是优化 “转移”。
在一些 \(dp\) 方程的状态转移过程中,我们通常需要在某个范围内进行择优,选出最佳决策点,这往往可以作为 \(dp\) 优化的突破口。
数据结构的使用较灵活,没有一个特定的模板,需要根据具体情况而定,选择合适的方案。由于状态转移总是伴随着区间查询最值,区间求和等操作,即动态区间操作,所以平衡树可以作为一个有用的工具,但考虑到代码复杂度,使用树状数组或者线段树将会是一个不错的选择。。
其实质是优化 “决策”。
以 \(The\) \(Battle\) \(of\) \(Chibi\) \([UVA12983]\) 为例,大概题意就是计算在给定的序列中严格单调递增子序列的数量,并对 \(1e9 +7\) 取模,给定序列长度小于等于 \(1000\) 。
方程应该是比较好推的,用 \(dp[i][j]\) 表示由序列中在 \(j\) 之前的数构成并以 \(a[j]\) 结尾的子序列中,长度为 \(i\) 的子序列的数量。则:\(dp[i][j]=\sum dp[i-1][k]\) ,其中 \(k < j\) \(且\) \(a[k] < a[j]\) 。
对于决策点 \(dp[i-1][k]\) 这里出现了 \(3\) 个信息:
\((1).\) 在原序列中的位置 \(k<j\) 。
\((2).\) \(a[k]<a[j]\) 。
\((3).\) \(dp[i-1][k]\) 的和。
对于 \((1)\),可以用枚举的顺序解决,剩下的两个信息即是数据结构需要维护的信息。
对于每一次 \(dp[i]\) 的决策,可以将 \(a[j]\) 作为数据结构维护的关键字, \(dp[i-1][j]\) 作为权值,加入 \(-inf\) 后离散化,得到一个大小为 \(N+1\) 的数组并在上面建立树状数组,每次计算 \(dp[i][j]\) 时查询前面已经加入的且关键字小于 \(a[j]\) 的 \(dp[i-1][k]\) 总和(即区间查询),然后把 \(dp[i-1][j]\) 加入树状数组(单点查询)。
时间复杂度为 \(O(logn)\)。
当问题涉及到的操作更复杂时,树状数组无法维护所需要的信息,就只有用线段树了。这道题较简单,所以选择了代码复杂度更低的树状数组。
方伯伯的玉米田 \([P3287]\)
【 标签】动态规划/二维树状数组
基站选址 \([P2605]\)
【 标签】动态规划/线段树
形如 \(dp[i]=min(dp[j]+w(j,i))\) \((L_i \leqslant j \leqslant R_i)\) 的 \(dp\) 方程被称作 \(1D/1D\) 动态规划,其中 \(L_i\) 和 \(R_i\) 单调递增,\(w(j,i)\) 决定着优化策略选择。
针对决策点具有的特性,可以大大降低寻找最优决策点的时间。
其实质是优化 “决策”。
设 \(j_0[i]\) 表示 \(dp[i]\) 转移的最优决策点,那么决策单调性可描述为 \(\forall i \leqslant j,j_0[i] \leqslant j_0[j]\)。也就是说随着 \(i\) 的增大,所找到的最优决策点是递增态(非严格递增)。
\(w(x,y)\) 为定义在整数集合上的一个二元函数,若 \(\forall a \leqslant b \leqslant c \leqslant d,w(a,c)+w(b,d) \leqslant w(a,d)+w(b,c)\),那么函数 \(w\) 满足四边形不等式。
为什么叫做四边形不等式呢?在 \(w(x,y)\) 函数的二维矩阵中挖一块四边形,左上角 加 右下角 小于等于 左下角 加 右上角。
\(w(x,y)\) 为定义在整数集合上的一个二元函数,若 \(\forall a < b,w(a,b)+w(a+1,b+1) \leqslant w(a+1,b)+w(a,b+1)\),那么函数 \(w\) 满足四边形不等式。
\(证明:\)
\(\because \forall a < c,w(a,c)+w(a+1,c+1) \leqslant w(a+1,c)+w(a,c+1)\)
\( herefore \forall a+1 < c,w(a+1,c)+w(a+2,c+1) \leqslant w(a+2,c)+w(a+1,c+1)\)
\(上下两式相加,有:\) \(w(a,c)+w(a+2,c+1) \leqslant w(a,c+1)+w(a+2,c)\)
\(以此类推\) \(\forall a \leqslant b\leqslant c,w(a,c)+w(b,c+1) \leqslant w(a,c+1)+w(b,c)\)
\(同理\) \(\forall a \leqslant b \leqslant c \leqslant d,w(a,c)+w(b,d) \leqslant w(a,d)+w(b,c)\)
\(1D/1D\) 动态规划具有决策单调性当且仅当函数 \(w\) 满足四边形不等式 时成立。
\(证明:\)
\(\because\) \(j_0[i]\) \(在\) \(dp[i]\) \(的决策点中最优\)
\( herefore\) \(\forall i \in [1,N],\forall j \in [0,j_0[i]-1],dp[j_0[i]]+w(j_0[i],i) \leqslant dp[j]+w(j,i)\)
\(易知\) \(\forall i' \in [i+1,N]\),\(均满足\) \(j<j_0[i]<i<i'\)。
\(又\) \(\because\) \(函数\) \(w\) \(满足四边形不等式\)
\( herefore\) \(w(j,i)+w(j_0[i],i') \leqslant w(j,i')+w(j_0[i],i)\)
\(移项得:\) \(w(j_0[i],i')-w(j_0[i],i) \leqslant w(j,i')-w(j,i)\)
\(与第一个式子相加,有:\) \(dp[j_0[i]]+w(j_0[i],i') \leqslant dp[j]+w(j,i')\)
最后的式子含义是:把 \(j_0[i]\) 作为 \(dp[i']\) 的决策点,一定比小于 \(j_0[i]\) 的任意一个 \(j\) 都要更好。也就是说,\(dp[i’]\) 的最优决策点不可能小于 \(j_0[i]\) ,即 \(j_0[i'] \geqslant j_0[i]\),所以方程 \(dp\) 具有决策单调性。
这里以 玩具装箱 \(toy\) \([P3195]\) 为例(因为这个比较好证 QAQ),先来证一波决策单调性。
设 \(S[n]=\sum _{i=1}^n (C[i]+1)\),用 \(dp[i]\) 表示装好前 \(i\) 个的最小花费,则 \(dp\) 方程为:\(dp[i]=min(dp[j]+(S[i]-S[j]-1-L)^2)\)。
很明显,这个方程是一个 \(1D/1D\) 动态规划方程,其中 \(w(i,j)=(S[i]-S[j]-1-L)^2\)。
(注意在四边形不等式中的 \(j\) 不是 \(i\) 决策点,可以理解为 \(i’\)。而 \(w(i,j)\) 的值可以理解为是由已完成的状态 \(dp[i]\) 转移到 \(dp[j]\) 所带有的附加价值)。
\(证明:设\) \(Q=S[i]-S[j]-1-L\)
\( herefore w(i,j)=(S[i]-S[j]-1-L)^2=Q^2\)
\( ext{证明:设}\) \(Q=S[i]-S[j]-1-L\)
\( herefore w(i,j)=(S[i]-S[j]-1-L)^2=Q^2\)
\(\begin{aligned} herefore w(i+1,j+1)=&(S[i+1]-S[j+1]-1-L)^2\\ =&((S[i]+C[i+1]+1)-(S[j]+C[j+1]+1)-1-L)^2\\ =&(Q+C[i+1]-C[j+1])^2 \end{aligned}\)
\(\begin{aligned} w(i,j+1)=&(S[i]-S[j+1]-1-L)^2\\ =&(S[i]-(S[j]+C[j+1]+1)-1-L)^2\\ =&(Q-C[j+1]-1)^2 \end{aligned}\)
\(\begin{aligned} w(i+1,j)=&(S[i+1]-S[j]-1-L)^2\\ =&((S[i]+C[i+1]+1)-S[j]-1-L)^2\\ =&(Q+C[i+1]+1)^2 \end{aligned}\)
\( herefore w(i,j)+w(i+1,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2-2C[i+1]C[j+1]+C[j+1]^2\)
\( herefore w(i+1,j)+w(i,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2+2C[i+1]+2C[j+1]+C[j+1]^2+2\)
\( herefore w(i,j)+w(i+1,j+1)-w(i+1,j)+w(i,j+1)=-2(C[i+1]+1)(C[j+1]+1)\)
\( ext{又} \because C[i],C[j] \geqslant 1\)
\( herefore -2(C[i+1]+1)(C[j+1]+1) \leqslant -8\)
\( herefore w(i,j)+w(i+1,j+1) \leqslant w(i+1,j)+w(i,j+1)\)
\( herefore w(i,j)+w(i+1,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2-2C[i+1]C[j+1]+C[j+1]^2\)
\( herefore w(i+1,j)+w(i,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2+2C[i+1]+2C[j+1]+C[j+1]^2+2\)
\( herefore w(i,j)+w(i+1,j+1)-w(i+1,j)+w(i,j+1)=-2(C[i+1]+1)(C[j+1]+1)\)
\(又 \because C[i],C[j] \geqslant 1\)
\( herefore -2(C[i+1]+1)(C[j+1]+1) \leqslant -8\)
\( herefore w(i,j)+w(i+1,j+1) \leqslant w(i+1,j)+w(i,j+1)\)
由定理 \((1)\) 可知,函数 \(w\) 满足四边形不等式。
又由定理 \((2)\)可知, 方程 \(dp\) 具有决策单调性。
在实战中,通常使用打表的形式来验证 \(w\) 函数的递变规律。
(\(ps.\) 对于此处及以下语言不严谨处,大家可以认真思考并给予建议,待日后对其理解加深后再行修改。)
这里选择不同的例题将二者分开讲。
二分栈,顾名思义就是二分加栈。
用栈维护单调的决策点,二分找到最优决策点。
以 \(Lightning\) \(Conductor\) \([P3515]\) 为例,题目大意就是在给定长度为 \(n\) 的序列 \(a\) 中,对于每一个 \(i\),找到最小的自然数 \(p_i\) 满足对于任意的 \(j \in [1,n]\),均有 \(a_j \leqslant a_i+p_i-\sqrt{\left|i-j\right|}\) 。
把这个式子变下形:\(p_i \geqslant a_j-a_i+\sqrt{\left|i-j\right|}\) 。
即 \(p_i=max \{ a_j+\sqrt{\left|i-j\right|} \} -a_i\)
即 \(p_i=max \{ max\{a_j+\sqrt{i-j}\}(j \in [1,i]),max\{a_j+\sqrt{j-i}\}(j \in [i+1,n]) \}-a_i\)
可以发现里面两个 \(max\) 可以视为同一个问题(只要把序列翻转一下就可以了),所以只需要考虑求出对于每一个 \(i\) 的 \(max\{ a_j+\sqrt{i-j} \}\),其中 \(j \in [1,i]\)。
设 \(y_j=a_j+\sqrt{i-j}\)
那么我们会得到 \(n\) 个关于 \(i\) 函数,\(p_i=max\{ y_j \}\)。
将样例画出来,如图:
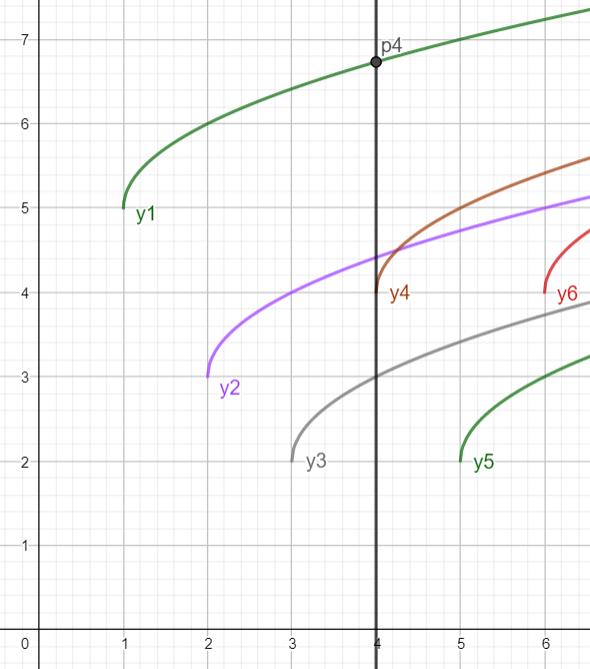
可知当 \(i=4\) 时,直线 \(x=4\) 与 \(y1=a_1+\sqrt{x-1}\) 的交点即为 \(p_4\)。
在上图中,对于任意 \(j \in [1,n]\) ,\(y1\) 总是在最上面,也就是说下面的其他函数可以踢掉不要,但由于 \(sqrt\) 函数的增速递减,会出现如图中 \(y2,y4\) 的情况,即存在一个交点使得在该点两边时两条直线的位置关系不同。此时如果没有上面的 \(y1\),\(y2,y4\) 都有可能成为答案,所以不能乱踢。
看下面这种情况:
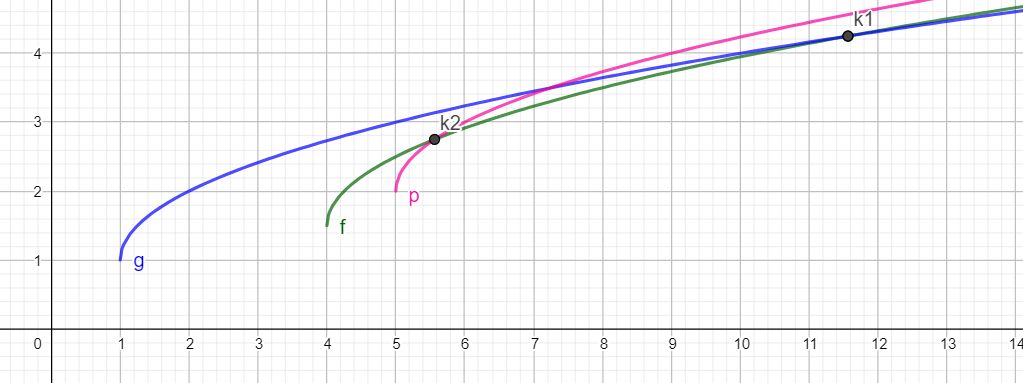
设 \(k_1\) 为 \(y_1,y_2\) 的交点,\(k_2\) 为 \(y_2,y_3\) 的交点。
此时 \(k_1 > k_2\),可以发现 \(y_2\) 始终在其他直线的下面,可以放心的将其踢掉。
所以维护出来的决策集合大概就是酱紫的:
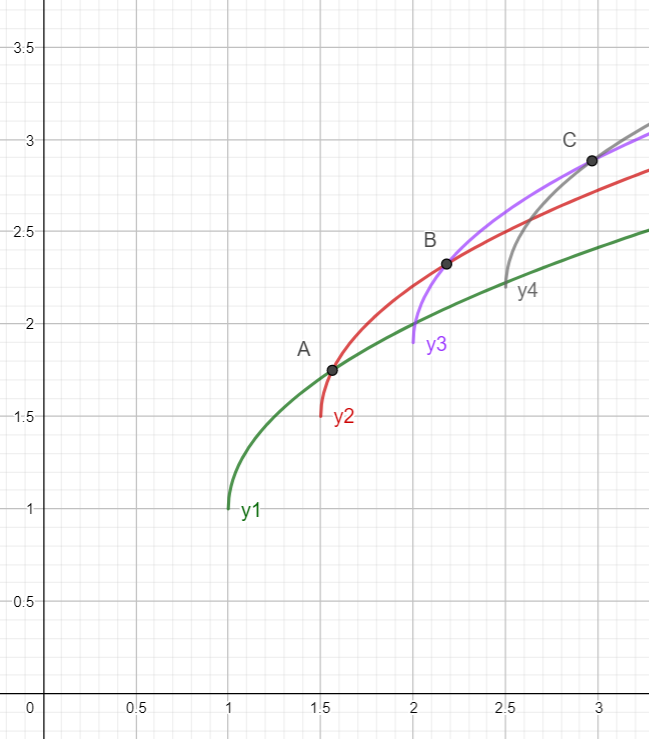
对于不同的 \(i\) 来说,都有一个互不不同的直线在最上方,所以该决策集合里的直线都是有用的。可以从图中看出,最优决策点单调递增(决策单调性的数学证明较麻烦,本人能力不足,不作探讨)。
维护决策集合用单调队列,查找直线交点用二分,随便搞搞就行了。
时间复杂度为 \(O(nlogn)\)。
为方便描述,用 \(dp[a,b]\) 表示 \(dp[a],dp[a+1],dp[a+2]...dp[b]\)。
假设我们已知 \(dp[l,r]\) 的最优决策点均位于 \([L,R]\),再设 \(dp[mid]\) 的最优决策点为 \(j_0\),其中 \(mid=(l+r)/2\)。根据决策单调性的定义可知:
\(dp[l,mid-1]\) 的最优决策点位于 \([L,k]\),
\(dp[mid+1,r]\) 的最优决策点位于 \([k,R]\)。
原问题变成了两个规模更小的同类型问题,所以可以用分治来对 \(dp\) 进行优化。
分治的话理解和代码都要简单一些,但在某些情况下可能要被卡,时间复杂度会严重退化,所以还是二分栈的实用性更高。
还是以 \(Lightning\) \(Conductor\) \([P3515]\) 为例,每次的分治中先暴力扫一遍找到 \(p[mid=(l+r)/2]\) 的最优决策点 \(j_0\),然后做一下左边,再做一下右边,然后 \(...\) 然后 \(...\) 就没了。
时间复杂度为 \(O(nlogn)\)。
\(Lightning\) \(Conductor\) \([P3515]\)
【标签】动态规划/决策单调性
\(Noi\) 嘉年华 \([P1973]\)
【标签】动态规划/决策单调性
大佬 \([P3724]\)
【标签】动态规划/决策单调性
形如 \(dp[i]=max/min \{ dp[j]+funtion(i)+function(j) \}\) 的 \(dp\) 方程均可尝试使用单调队列优化。
单调栈和单调队列给我们展现出了一种思想:在保证正确性的前提下,及时排除不可能的决策点,保持决策集合内部的有序性和查找决策的高效性。之前的二分栈,此处的单调队列优化,和后面的斜率优化都是以此为核心来运作的。
其实质是优化 “决策”。
琪露诺 \([P1725]\)(盗版滑动窗口QAQ)。
在给定序列中找出一条路径使其经过的点之和最大,且每次可走的距离在给定区间 \([l,r]\) 以内。
方程非常简单:\(dp[i]=max\{ dp[j]+a[i] \} (i-r \leqslant j \leqslant i-l)\) 。
在某一次决策中,由于决策点 \(j\) 只可能在 \([i-l,i-r]\) 这一段区间内,可以只将这些点放入决策集合。
而 \(l,r\) 是定值,当 \(i\) 不断增大时,之前小于 \(i-l\) 的 \(j\) 现在还是小于 \(i-l\),所以可以永远地踢掉。
若 \(j < j'\) 且 \(dp[j] \leqslant dp[j']\),那么 \(dp[j]\) 也可以永远地踢掉。为什么呢? \(j\) 在 \(j'\) 的前面,一定会先成为不合法决策点,而 \(j\) 的价值又比 \(j'\) 小,因此留下来只是浪费扫描的时间。
最终维护出了一个价值递减的单调队列。
\(M\) 个工人要对 \(N\) 块木板进行粉刷。工人 \(i\) 要么不刷,要么就刷不超过 \(L_i\) 块并且包含 \(S_i\) 的连续一段木板,每粉刷一块木板有 \(P_i\) 的报酬。要求使总报酬最大。
\(S_i\) 的散乱分布非常讨厌,所以先把工人按 \(S_i\) 排个序。
主要信息有“工人序号”,“木板序号”,“报酬”这三个,而其中“报酬”为所求答案,可以用 \(dp[i][j]\) 表示前 \(i\) 个工人刷完前 \(j\) 块木板所得总报酬。
考虑状态转移:
第 \(i\) 个工人可以跳过不刷木板,也可以跳过第 \(j\) 块木板不刷,因此先在 \(dp[i-1][j]\) 和 \(dp[i][j-1]\) 当中取个最大值。
工人 \(i\) 想要粉刷的区间 \([k+1,j]\) 必须包括 \(S_i\),并且区间长度要小于等于 \(L_i\)。
所以得出 \(dp\) 转移方程:\(dp[i][j]=max \{ dp[i-1][j],dp[i][j-1],dp[i-1][k]+P_i*(j-k) \}\),其中 \(S_i \leqslant j\) 且 \(k \in [j-L_i,S_i-1]\)。
\(k\) 为决策点,\(P_i*j\) 为定值可以单独提出来,所以实际上就是上面琪露诺 \([P1725]\)一样的类型,只是加了一维而已。
最终维护出了一个 \(dp[i-1][k]-P_i*k\) 递减的单调队列。
先来回顾一下多重背包问题。
用 \(v,w,c\) 分别表示物品重量,价值,数量,\(n\) 为物品数量,\(V\) 为背包容量。\(dp\) 方程为:\(dp[j]=max\{ dp[j-k*v[i]]+k*w[i] \}\) \((j \in [v[i],V],\) \(k \in [1,min(c[i],j/v[i])])\)
还可以用二进制拆分来进行优化,但就是有这样一道题,连 \(log\) 都要卡:多重背包 \([CodeVS5429]\)。所以还需要考虑更高效的算法。
但说来说去似乎都和单调队列扯不上关系。
为何?
观察 \(dp[j]\) 和 \(dp[j-1]\) 决策集合:
\(dp[j]: \{ j \% v[i]...j-2*v[i],j-v[i] \}\)
\(dp[j-1]: \{ (j-1) \% v[i]...(j-1)-2*v[i],(j-1)-v[i] \}\)
\(dp[j]\) 的每一个决策点都与 \(dp[j-1]\) 不同,很难根据 \(dp[j-1]\) 的决策集合转移成 \(dp[j]\) 的决策集合。
再看 \(dp[j]\) 和 \(dp[j-v[i]]\):
\(dp[j]: \{ j-c[i]*v[i]...j-2v[i],j-v[i] \}\)
\(dp[j-v[i]]: \{ j-(c[i]+1)*v[i]...j-3v[i],j-2v[i] \}\)
可以发现上面只是比下面的区别仅仅在于 \(j-(c[i]+1)*v[i]\) 和 \(j-v[i]\) ,恰好满足单调队列的一个特性:但有新的决策出现时,决策点集合中会去掉一部分不合法的,再加上一部分新来的。
所以我们可以按照 \(j%v[i]\) 的余数来分一下:
\(dp[j](j\%v[i]=0):\{0,v[i],2v[i]...j-2v[i],j-v[i]\}\)
\(dp[j](j\%v[i]=1):\{1,v[i]+1,2v[i]+1...j-2v[i],j-v[i] \}\)
\(...\)
\(dp[j](j\%v[i]=v[i]-1):\{v[i]-1,2v[i]-1...j-2v[i],j-v[i]\}\)
设 \(j=p*v[i]+r\),那么原方程可改为: \(dp[p*v[i]+r]=max\{ dp[r+k*v[i]]+(p-k)*w[i] \}\) \((r \in [0,v[i]-1],\) \(p \in [1,\lfloor(V-r)/v[i]\rfloor],\) \(k \in [p-min( \lfloor V/w[i]\rfloor ,c[i]),p])\)
只要在最外层将 \(i,r,p\) 都枚举出来,这就是一个标准的单调队列可优化方程,用类似 \(fence\) \([POJ1821]\) 的方法维护即可。
时间复杂度为 \(O(N*V)\) 。
\(fence\) \([POJ1821]\)
【标签】动态规划/单调队列
多重背包 \([CodeVS5429]\)
【标签】动态规划/单调队列/多重背包
我要长高 \([UESTC594]\)
【标签】动态规划/单调队列
由于篇幅过大,已搬出。。。。。
补充:其实质是优化 “决策”。
(本文部分内容摘自以下文章)
\(dp\) 基础 — \(DraZxINDdt\)
《算法竞赛进阶指南》李煜东
《动态规划算法的优化技巧》毛子青
星云-星云娱乐新能源材料回收公司

微信二维码
微信号:weixin888Copyright © 2012-2018 星云-星云娱乐新能源材料回收公司 版权所有 非商用版本 琼ICP备45612387号

